哪些控制类的算法惊艳了你?

讲一个效果很震撼的
现在的机器人运动控制,基本上都是针对某一个或某一类动作进行设计,以仿人机器人为例,一个踢球动作就有上百上千篇学术论文在研究。
而人工智能机器学习这些,在实际机器人运动控制、规划中的使用还基本上局限于学习个模型参数程度的水平。
用算法根据环境和机器人状态自动生成动作?似乎还很遥远。
直到我看到这个研究:
CONTACT-INVARIANT TRAJECTORY OPTIMIZATION
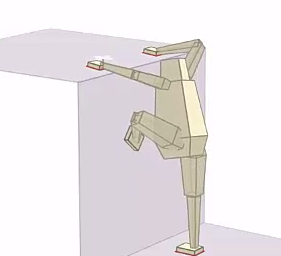
一句话,对于任意结构的机器人,任意初始姿态位置,只要指定了末状态,算法可以自动生成符合物理规律的,机器人全身动作。
不只是走两步,站起来这么简单,甚至有爬楼梯、倒立、两人配合攀登等等。。

看视频更直观:
http://homes.cs.washington.edu/~todorov/highlight/MordatchSIGGRAPH12.mp4甚至转笔这种动作:
http://homes.cs.washington.edu/~todorov/highlight/MordatchSCA12.mp4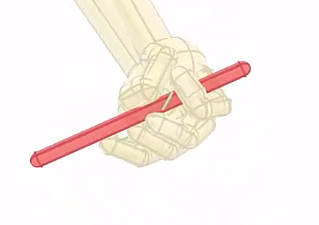
这个教授的主页
Emo Todorov保加利亚人,高中是数学和信息的双料国际金牌。。。
想听原理的话,简单说来,用轨迹优化,特殊之处是用加附加变量的方式把各个接触面的接触情况也编码进整个模型的“状态”里,并使用“软化” 的接触动力学模型,把运动规划这个本来包含很多不连续处(比如撞击,其实任何接触面的变化都意味着系统动力学特性的突变)的问题表述成一个连续、无约束的凸优化问题。详情去看论文。
虽然严格说来算法对实际环境做了不少假设和简化,但它解决的问题还是非常有价值,给人以启发的。
/***************更新***************/
1. 感谢许多知友的提醒,这个其实不算控制算法,属于运动规划算法。算法得到的轨迹往机器人身上用的时候,需要的是控制算法来聪明地利用反馈信息,既实现动作又维持机器人平衡等要求。
2. 该实验室在此项目上正在做的就是做实时控制器。已经发表的成果是通过同时对多个不同的模型进行轨迹优化,提高轨迹的鲁棒性(想法是,如果一条轨迹在仿真中对10个质量分布略不同的机器人都能稳定,那实际的机器人应当处于这10个情况中间的某处,也稳定),在线跑时用一个简单的线性反馈控制器。实现了DARwIn上幅度很大的动作,比如一步转身90度之类。论文连接:
http://homes.cs.washington.edu/~todorov/papers/MordatchICRA15.pdf3. 我微信在写机器人新闻,手动翻译国外最新消息,懒得看英文新闻又对机器人行业感兴趣的童鞋欢迎关注:微信号GoRobotics